Mission Autonomy for Underwater Mine Countermeasures
Autonomous underwater navigation, object classification and mapping in a cluttered harbor environment using a lightweight world model.
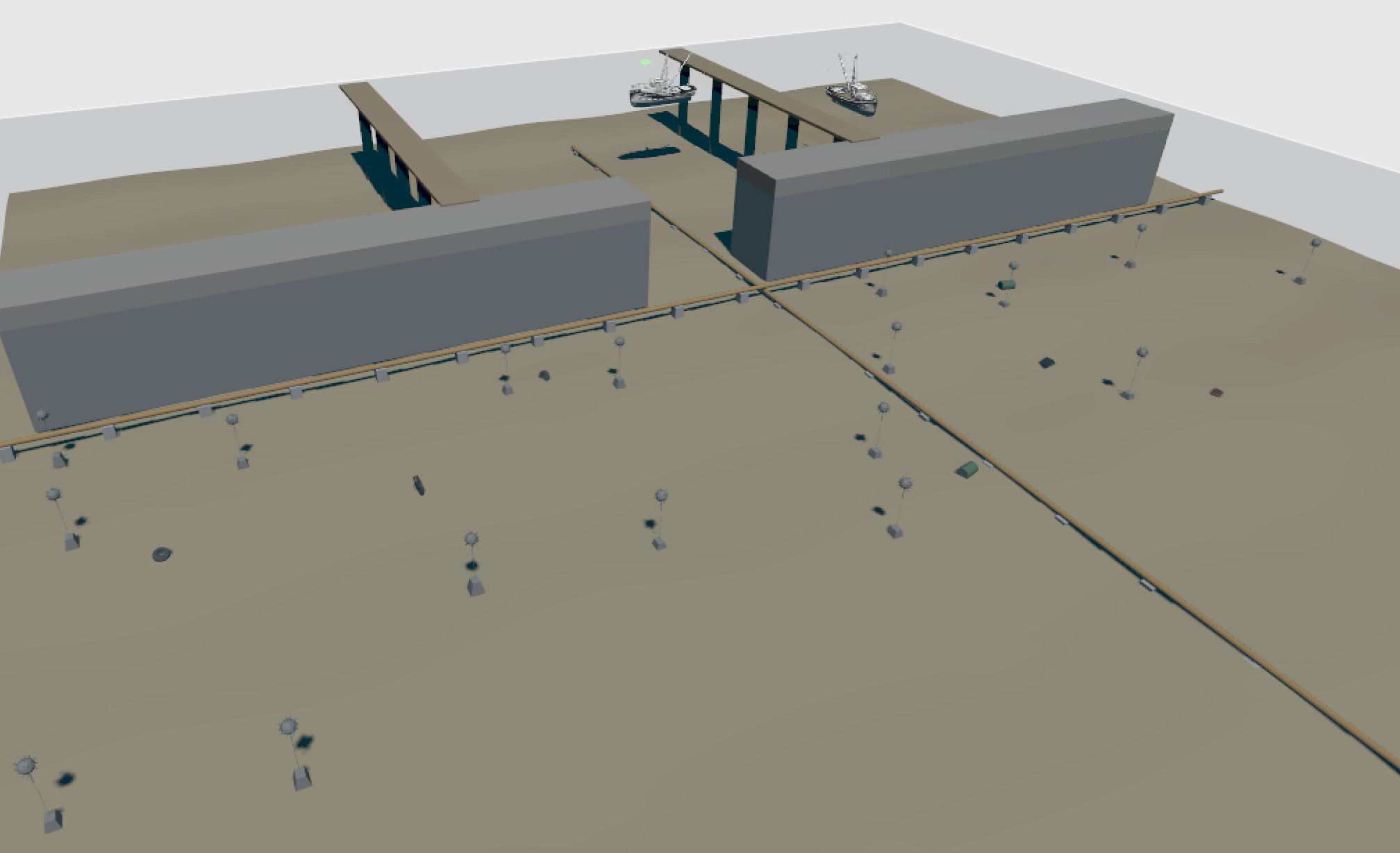
Simulated harbor environment used for autonomous mine countermeasure experiments.
Motivation
Mine Countermeasures (MCM) operations represent one of the most challenging and resource-intensive tasks in the maritime domain. Autonomous underwater systems (AUV) have the potential to significantly improve the safety and efficiency of such missions by reducing human exposure to hazardous environments while increasing operational endurance.
The objective of this project is to investigate the application of modern artificial intelligence techniques to underwater mission autonomy within a simulated harbor environment. A BlueROV2, autonomous underwater robot is tasked with approaching a harbor from open water, detecting, classifying and mapping mine-like objects, building situational awareness of the environment, and identifying safe navigation corridors toward the objective (world model).
The project combines several emerging technologies, including synthetic perception, object detection, semantic mapping, lightweight world models, and autonomous decision-making. Particular focus is placed on the use of compact AI world models capable of maintaining an internal representation of the operational environment and predicting future actions in GPS-denied underwater conditions.
Through the development of a digital twin and simulation-based experimentation, the project aims to explore how next-generation maritime autonomous systems could support future mine countermeasure, harbor inspection, and maritime security operations.
Mission Scenario
The vehicle is deployed from open water and tasked with approaching a protected harbor area. During transit, the system must detect mine-like objects, maintain situational awareness, and identify a safe route through the harbor entrance while operating in a GPS-denied underwater environment.
- Open sea
- Mine-like object
- Debris
- Quay wall
- Harbor entrance
- Safe navigation corridor
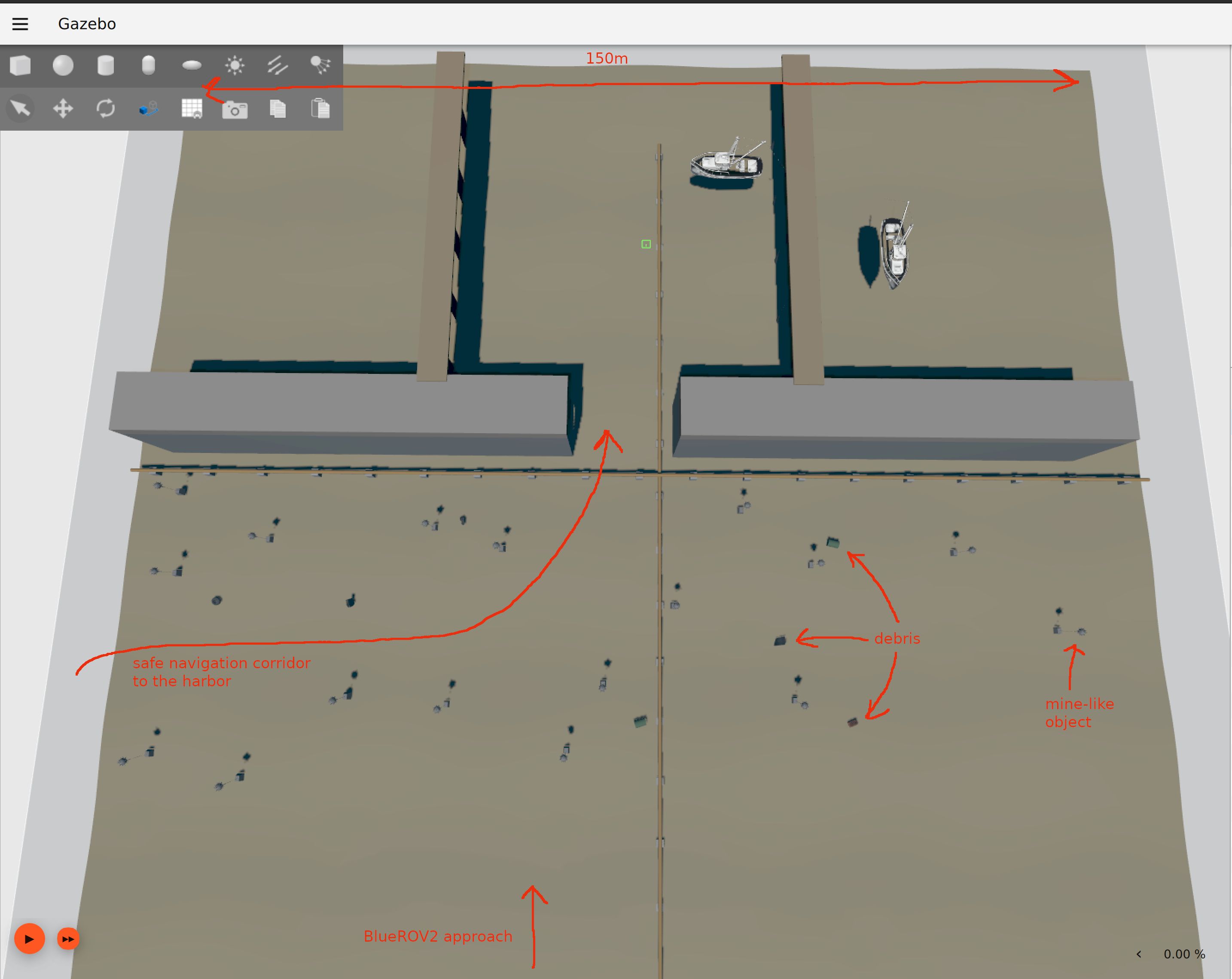
The vehicle approaching from open water in possible mission scenario searching for the safe navigation corridor to the harbor entrance.
Research Objectives
The project investigates how modern AI techniques can be applied to maritime mission autonomy in GPS-denied underwater environments. Particular focus is placed on situational awareness, hazard detection, semantic mapping, and decision-making under uncertainty.
- Can a compact world model reduce the need for extensive hand-crafted mission logic?
- Can an autonomous underwater vehicle learn harbor approach and navigation behaviors from simulated experience?
- How efficiently can mine-like objects and other hazards be detected and incorporated into a semantic map during exploration?
- Can future mission states and safe navigation corridors be predicted before executing a maneuver?
- What information must be retained to maintain situational awareness in a dynamic maritime environment?
- How can natural-language mission objectives be transformed into autonomous underwater behaviors?
- How can mission progress be transferred to the operator in real-time?
- Can a world model act as an information compression mechanism for underwater autonomy, transmitting only mission-relevant knowledge instead of large volumes of raw sensor data?
Project Architecture
The autonomy stack is designed around mission-level decision-making rather than direct teleoperation. A natural-language mission interface defines the operator's intent, while the perception layer builds situational awareness from simulated sensor inputs. A lightweight world model maintains an internal representation of the environment and supports action prediction for autonomous navigation through a potentially hazardous harbor approach. The mission decision layer evaluates potential courses of action and selects behaviors that best satisfy mission objectives while minimizing operational risk. Selected actions are executed through the vehicle control layer, while a communication layer continuously relays mission-critical information, detected hazards, and mission progress to the operator via low-bandwidth underwater communication links.
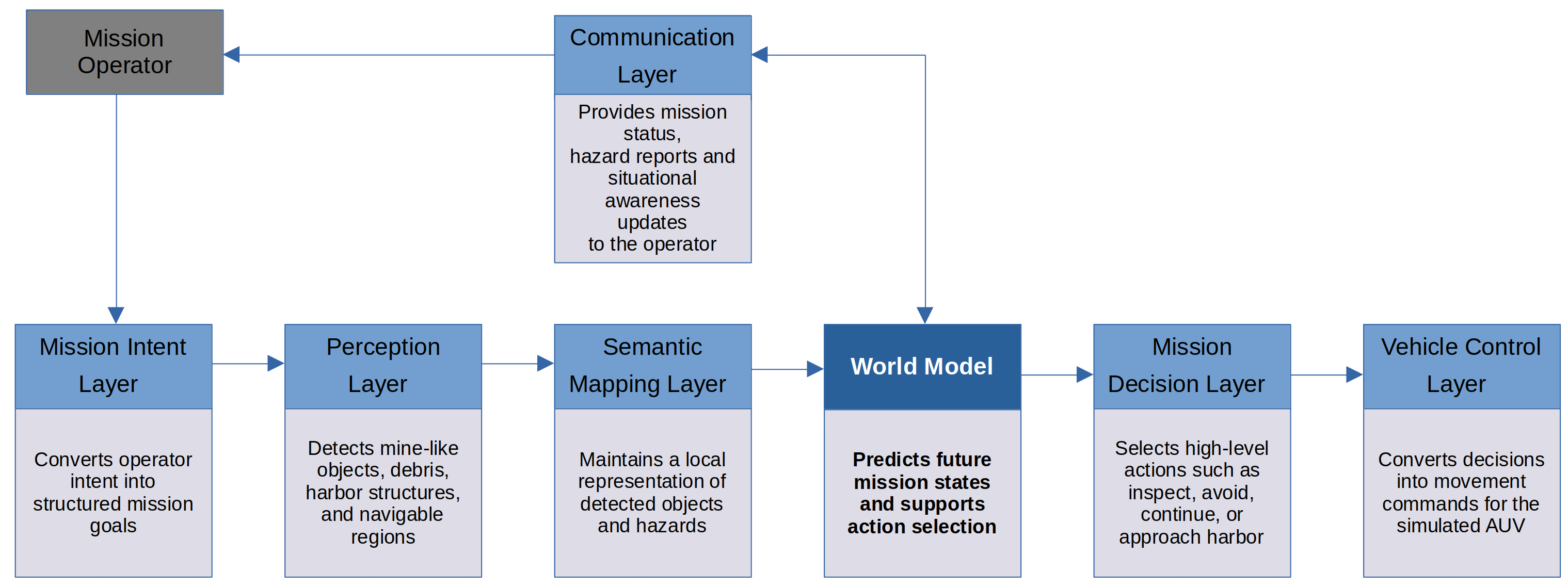
Architecture diagram. Current implementation: digital twin, mission scenario, preliminary perception pipeline, world model design. In development: semantic mapping, world model training, autonomous decision layer.
Mission Intent Layer
The mission intent layer provides a high-level interface between the operator and the autonomous system. Mission objectives can be specified using natural language and are translated into structured mission goals that can be executed by the autonomy stack. Examples include harbor reconnaissance, mine countermeasure surveys, infrastructure inspection, and autonomous navigation tasks.
Inputs:
- Natural language mission descriptions (i.e. "Investigate sector 5.")
- Operator mission objectives (e.g. "Map mine-like objects and identify a safe navigation corridor into the harbor.")
- Mission constraints (e.g. "Avoid entering restricted zones and maintain a minimum distance from detected hazards.")
Outputs:
- Structured mission goals (e.g. Survey designated search sectors and generate a hazard map.)
- Navigation objectives (e.g. Reach the harbor entrance while maintaining a safe stand-off distance from detected threats.)
- Mission priorities (e.g. Threat detection and classification take precedence over minimizing transit time.)
Perception Layer
The perception layer provides the vehicle's understanding of the surrounding environment. Sensor observations are fused to detect mine-like objects, identify harbor structures, and estimate free navigable space. The generated environmental representation is subsequently used by the world model to maintain situational awareness and support mission-level decision-making.
Inputs:
- Vehicle pose
- Sonar data
- Camera image
- Harbor elements observations
Outputs:
- Semantic environment representation
- Mine-like object detections
- Harbor structure detections
- Navigable regions
- Environmental observations for the world model
A first YOLO26s object-detection model was trained on a synthetic underwater dataset generated from a Gazebo maritime scene. The dataset includes visual variation in lighting, fog density, water color, and image blur to approximate different underwater visibility conditions.
Validation results:
| Metric | Value |
|---|---|
| Precision | 0.898 |
| Recall | 0.904 |
| mAP50 | 0.955 |
| mAP50-95 | 0.791 |
The strongest current classes are mine and mine_anchor. Other classes, including barrel, tire, stone, crate, and mine_chain, are underrepresented and will be expanded in the next dataset version.
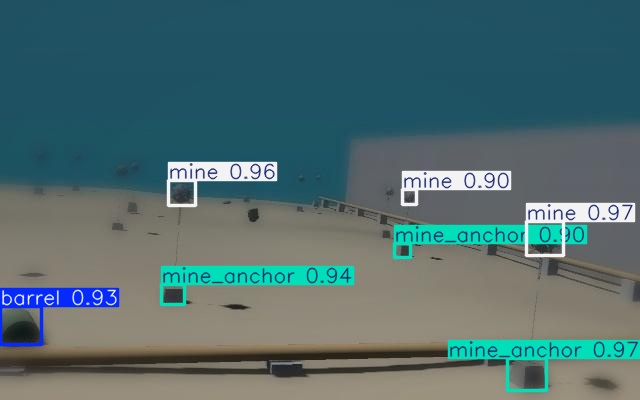
First results obtained using a synthetic dataset of 288 images (70:20:10 train/validation/test split), trained for 150 epochs under varying ambient lighting, water color, fog density, and blur conditions.
Source code: GitHub repository
Semantic Mapping Layer
The semantic mapping layer maintains a structured representation of the operational environment with combined observations collected over mission time. Detected objects (mine-like objects, harbor structures, navigable regions) are stored in a continuously updated mission map. This representation provides the foundation for situational awareness and future decision-making.
Inputs:
- Mine-like object detections
- Harbor structure detections
- Navigable region estimates
- Vehicle pose estimates
- Environmental observations
Outputs:
- Semantic environment map
- Hazard locations
- Harbor structure map
- Navigable corridor representation
- World model observations
World Model
The world model maintains information from semantic representation and predicts future mission states based on current observations and historical information. By compressing relevant environmental information into a compact latent representation, the model aims to support long-horizon planning and autonomous decision-making in uncertain underwater environments.
Inputs:
- Semantic environment map
- Vehicle state
- Mission objectives
- Historical observations
Outputs:
- Internal environment representation
- Predicted future states
- Estimated mission progress
- Navigation recommendations
- Decision-support information
A recurrent neural network (GRU) was developed to learn the temporal dynamics of an autonomous underwater mission directly from structured mission logs. Each input sequence consists of the recent history of the vehicle state, detected objects, mission context, and executed actions. The network compresses this history into a latent representation and predicts the next world state using multiple output heads for continuous state variables (vehicle motion and object positions), binary events (object visibility), and discrete mission variables (contact type, decision, action, and mission state). The current implementation serves as a proof of concept and provides the foundation for future training on real mission data generated by the ROS2/Gazebo simulation environment and, ultimately, field deployments.
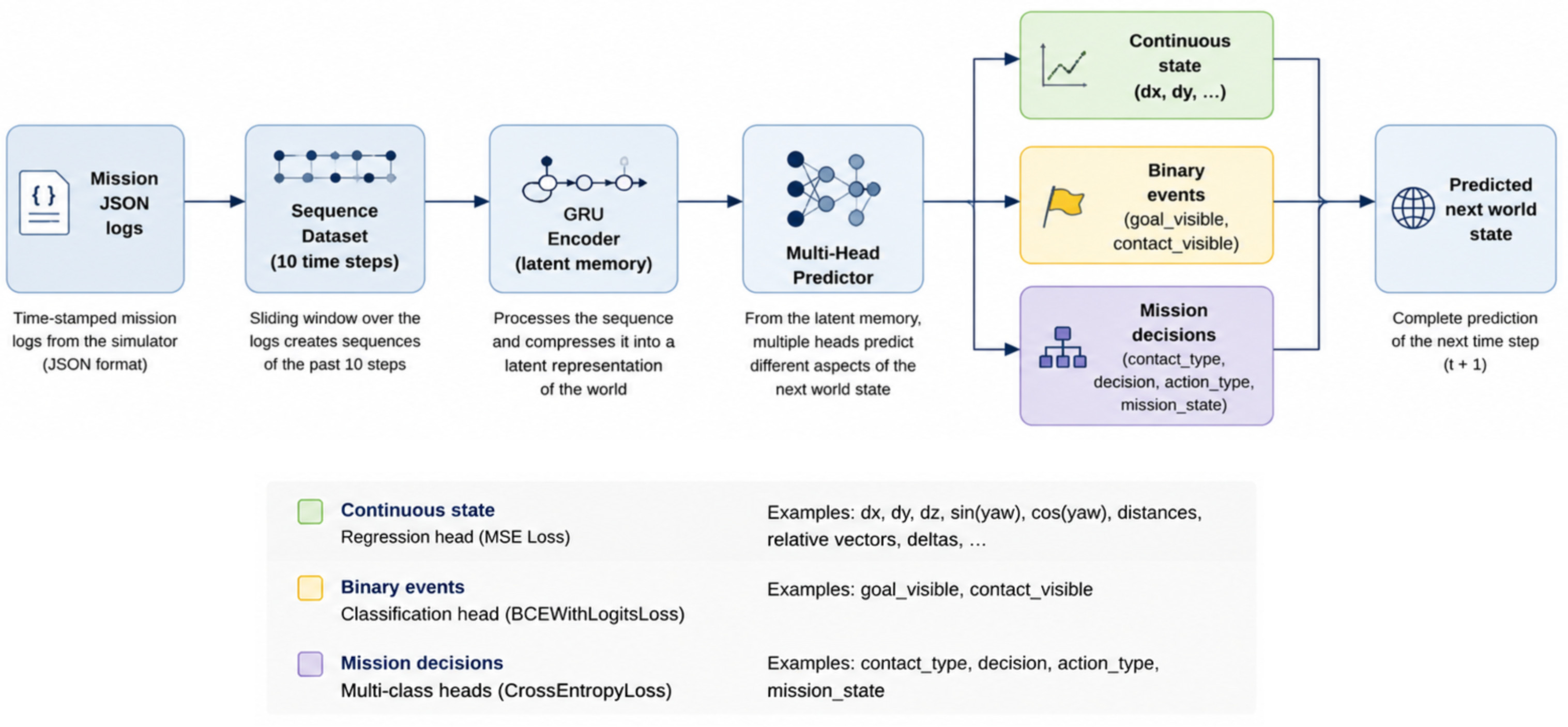
Architecture diagram of GRU network of a world model.
Current status: Proof of concept trained on synthetic data from the simulator. The architecture is ready for trainingon real mission data.
Mission Decision Layer
The mission decision layer determines the most appropriate course of action based on evaluation of the current mission objectives, environmental observations and predictions generated by the world model. The objective is to maximize mission success while minimizing operational risk and avoiding potential hazards.
Inputs:
- Mission objectives
- World model predictions
- Semantic map
- Vehicle state
- Mission constraints
Outputs:
- High-level navigation actions
- Inspection commands
- Hazard avoidance maneuvers
- Mission execution decisions
- Vehicle control objectives
Vehicle Control Layer
The vehicle control layer converts mission-level decisions into executable commands for the autonomous underwater vehicle. This layer is responsible for maneuvering the vehicle, controlling additional devices (i.e. cameras, sonars, or inspection payloads), following planned trajectories, and maintaining stable operation within the underwater environment.
Inputs:
- Navigation objectives
- Desired vehicle actions
- Desired additional device actions
- Mission execution commands
Outputs:
- Thruster commands
- Device commands
- Vehicle motion control
- Platform status information
Communication Layer
The communication layer addresses one of the basic challenges of autonomous underwater operations: the reliable transfer of mission information in an environments with no GPS coverage and communication constraines. Unlike surface or aerial systems, vehicles operating under the water cannot rely on conventional radio communication, cellular networks, or GPS. Instead, mission information is typically exchanged using acoustic communication systems.
Modern autonomous underwater vehicles use acoustic modems, which transmit low-bandwidth messages through the water using sound waves. While unsuitable for continuous video streaming, acoustic communication is sufficient for transmitting mission-critical information such as vehicle status, detected hazards, mission progress, and environmental observations.
Future versions of this project will investigate the integration of a suitable communication layer, that is capable of transmitting compact semantic information generated by the world model, including detected mine-like objects, navigable corridors, and mission status updates. Such an approach may reduce communication bandwidth requirements while maintaining operator situational awareness during long-duration autonomous missions.
Inputs:
- Semantic map updates
- Mission status
- Vehicle state information
- Hazard detections
- World model observations
Outputs:
- Mission progress reports
- Detected mine-like object locations
- Safe navigation corridor updates
- Vehicle health and status information
- Operator situational awareness updates
Current Status
The project is currently focused on the development of a simulation environment and the definition of an autonomy architecture for underwater mine countermeasure missions. A digital twin of a harbor environment has been created in Gazebo, including harbor infrastructure, mine-like objects, and underwater debris. The simulation environment serves as the foundation for future perception, mapping, and mission autonomy experiments.
Current efforts are focused on the generation of synthetic datasets and the development of an object detection pipeline capable of identifying mine-like objects within the simulated environment. In parallel, the architecture of a lightweight world model is being defined to support future semantic mapping and autonomous decision-making capabilities.
| Task | Status |
|---|---|
| Harbor digital twin environment in Gazebo | Implemented |
| BlueROV2 simulation platform | Implemented |
| Harbor infrastructure and obstacle modeling | Implemented |
| Mine-like object and debris scenarios | Implemented |
| Mission autonomy architecture design | Implemented |
| World model concept and research framework | Implemented |
| Synthetic dataset generation | Implemented |
| Object detection and classification pipeline | In progress |
| Semantic environment representation | In progress |
| World model implementation | Implemented |
| Autonomous harbor approach navigation | Planned |
| Safe corridor identification | Planned |
| Mission-level decision making | Planned |
| Natural-language mission specification | Planned |
| Acoustic communication concepts for operator situational awareness | Planned |
| Multi-mission evaluation and benchmarking | Planned |
Future Work
The current implementation focuses on the development of a digital twin environment and the design of an autonomy architecture for simulated mine countermeasure missions. Future work will gradually introduce additional capabilities required for mission-level autonomy in realistic underwater environments.
Planned developments:
- Synthetic dataset generation for maritime object detection
- Detection and classification of mine-like objects and underwater debris
- Semantic mapping of hazards and harbor structures
- Training of a lightweight world model for environment representation
- Prediction of future mission states and navigation outcomes
- Autonomous harbor approach and safe corridor identification
- Natural-language mission specification using large language models
- Integration of acoustic communication concepts for operator situational awareness
- Evaluation across multiple harbor layouts and mission scenarios
- Simulation-to-real transfer for deployment on physical underwater vehicles
Long-Term Vision
The long-term objective of the project is to investigate how compact AI-based autonomy systems can support future maritime autonomous operations. By combining perception, semantic mapping, world models, mission planning, and low-bandwidth communication concepts, the project aims to explore technologies relevant to mine countermeasure missions, harbor security, infrastructure inspection, and autonomous underwater reconnaissance.