Robot Task Orchestration with Behavior Trees
Modular orchestration of robotic workflows with explicit task sequencing, fallback handling, and separation between decision logic and execution.
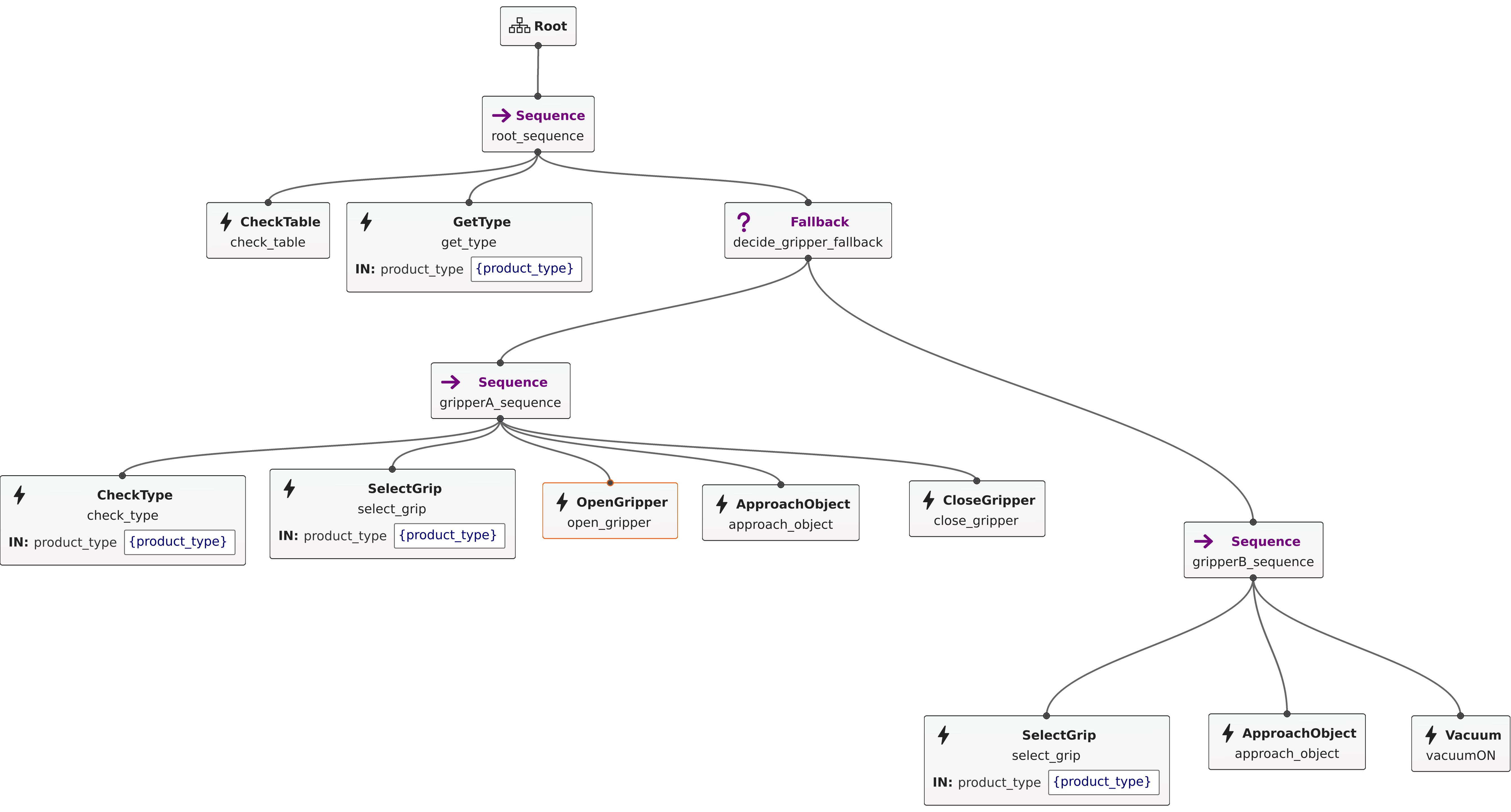
Example behavior tree used for robotic task orchestration.
Project description
As robotic applications grow in complexity, task execution can no longer be handled as a simple linear sequence of actions. Systems combining perception, planning, and actuation require orchestration mechanisms that are modular, readable, and robust to failure. This project explores the use of Behavior Trees as a structured approach to task-level coordination in robotic systems.
The orchestration layer is designed to coordinate perception, planning, and execution components within a modular decision structure that supports branching logic, fallback handling, and reusable task composition. The same structure also aligns well with skill-based robotics, where individual skills can be represented as reusable behavior tree nodes or subtrees.
System overview
The orchestration layer is structured around explicit task states and transitions, allowing robotic workflows to be represented as hierarchical behavior trees rather than monolithic control scripts. This improves readability, maintainability, and extensibility, particularly in systems where multiple subsystems must be coordinated under dynamic conditions.
- Hierarchical task composition
- Explicit sequencing and fallback behavior
- Separation between orchestration and low-level control
- Reusable structure across different robotic applications
- Natural mapping between reusable robot skills and tree nodes or subtrees
In this context, skill-based robot programming can be interpreted as a natural extension of behavior-tree-based orchestration. Individual robot skills, such as approaching an object, capturing an image, or executing a grasp, can be encapsulated as reusable nodes and combined into larger task-level behaviors.
Key challenges addressed
The main challenge addressed by this work is the orchestration of robotic tasks in systems where execution depends on multiple interacting subsystems and non-ideal conditions. In such environments, the control flow must remain understandable and maintainable while still supporting conditional branching, recovery behavior, and clear task boundaries.
- Managing non-linear execution flows
- Designing explicit fallback and recovery paths
- Coordinating perception, planning, and action layers
- Maintaining readability as task complexity grows
Outcome
The project demonstrates that Behavior Trees provide an effective abstraction for structuring robotic workflows at the task level. They enable modular composition of behavior, improve maintainability compared to linear control scripts, and support robust execution in systems that require conditional logic and recovery handling. In addition, they provide a natural framework for representing reusable robot skills as composable units within larger workflows.
Related publication
The orchestration approach has also been presented in a workshop publication, where behavior trees were used to structure task execution and recovery logic in robotic systems.
Behavior Tree as a Decision Planning Algorithm for Industrial Robots
SiPML 2024 workshop
What is intentionally not shown
Detailed node implementations, execution policies, and project-specific orchestration logic are intentionally omitted.